r
ДВИЖЕНИЕ НА ТЕЖЕСТИ ОТ
РОТАЦИОНЕН МАХОВИК
|
|
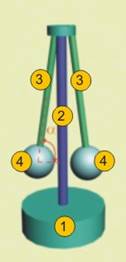
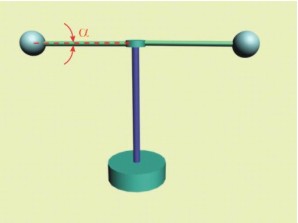
Нека да разгледаме ротационен маховик, състоящ се от
основа , ос‚, две рамена ƒ и две ротационни тела
„(фиг.1).
Когато маховикът е в покой, върху ротационните тела
действа само силата на тежестта. Под действие на тази сила рамената на маховика
са прибрани и ъгълът a между оста и хоризонталното направление е близък до 90о.
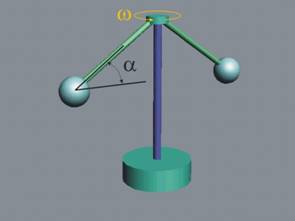
Ако маховикът се завърти с постоянна ъглова скорост w, върху ротационните
тела започват да действат инерционни сили, които разтварят рамената и ъгълът a става по-малък (фиг.2). За работата на маховика е необходимо да се
познава зависимостта на ъгъла от
ъгловата скорост w.
|
Фиг. 3
Фиг. 4 |
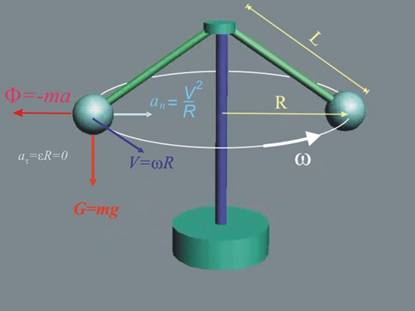

Първо да проследим формирането
на инерционната сила (фиг.3).
Тъй като условието беше
маховикът да се върти с постоянна ъглова скорост w, ъгловото ускорение e ще е нула, поради което тангенциалната компонента at на ускорението на ротационните тела също ще е
нула:
at = eR = 0
Пълното ускорение а
обаче няма да е нула, тъй като ще има нормална компонента:
![]() .
.
Така инерционната сила
ще има големина
Ф
= та
и ще бъде насочена навън
(обратно на посоката на ускорението), както е показано на фиг.3.
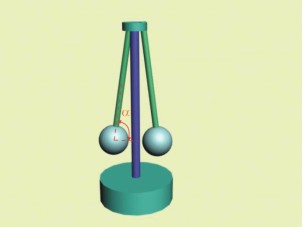
По време на движението всяко от
ротационните тела трябва да се намират в равновесие под действието на силата на
тежестта G, инерционната сила Ф и реакцията по оста на рамото Т (фиг.4):
![]() .
.
В DАВС дължината на хипотенузата АС ще отговаря на големината на силата Т, а дължината на катетите - на другите
две сили. Тогава за ъгъла ще се получи
![]() .
.
Като вземем предвид
зависимостите
![]()
![]()
![]() ,
,
получаваме връзката между
тангенса на ъгъла и ъгловата скорост:
![]() .
.
Понякога анализът на връзката
между скоростта на въртене и ъгълът на отклонение на рамената на маховика се
провежда по удобно, ако разполагаме с израз за синуса от ъгъла. Такъв израз
може да се получи, като заместим радиуса R с дължината на рамото,
изразена от DDAO
![]() ®
® ![]() .
.
От друга страна ![]() . Като съпоставим
двата израза за tg(a),
получаваме:
. Като съпоставим
двата израза за tg(a),
получаваме:
![]() .
.
|
Фиг. 5
Фиг. 6 |
След като разполагаме с формули за определяне на ъгъла на
отклонение на рамената, можем да преминем към анализ на самото движение.
Когато маховикът забавя движението си и спира, тогава
ъгловата скорост w клони
към нула и се получава:
 (фиг.5).
(фиг.5).
Когато маховикът ускорява движението си и започва да се
движи с много голяма ъглова скорост w, клоняща към безкрайност, се
получава:
 (фиг.6).
(фиг.6).
Зависимостта на ъгъла от скоростта на въртене може да
бъде илюстрирана със следната таблица:
|
|
|
|
|
w1 < w2 |
w2 |
w3 > w2 |
|
a1 > a2 |
|
a3 < a2 |
{kind=link}
![]()